Research Interests
Current Research
Concluded Projects
On
The Predictability of Time Series by Metric Entropy,
by Hakki Erhan Sevil
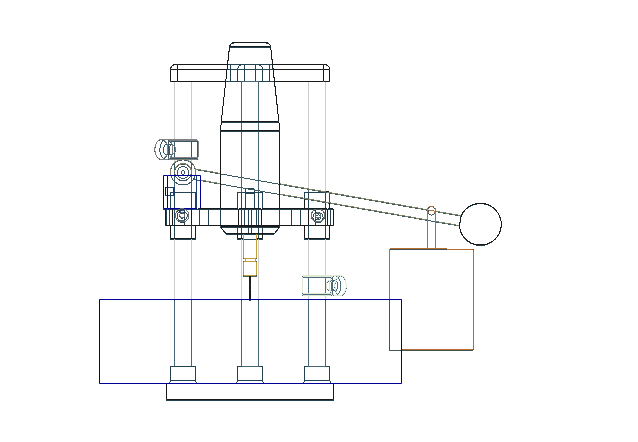
In this study, a series of condition monitoring experiments on
drill bits were carried out. On small diameter (1 mm ø) drill bits,
run-to-failure tests were performed, meanwhile vibration data were
consecutively taken in equal time intervals. Considering the vibration
data, nonlinear invariants, such as metric entropy, correlation dimension
and Lyapunov exponents were calculated to assess drill bit condition. In
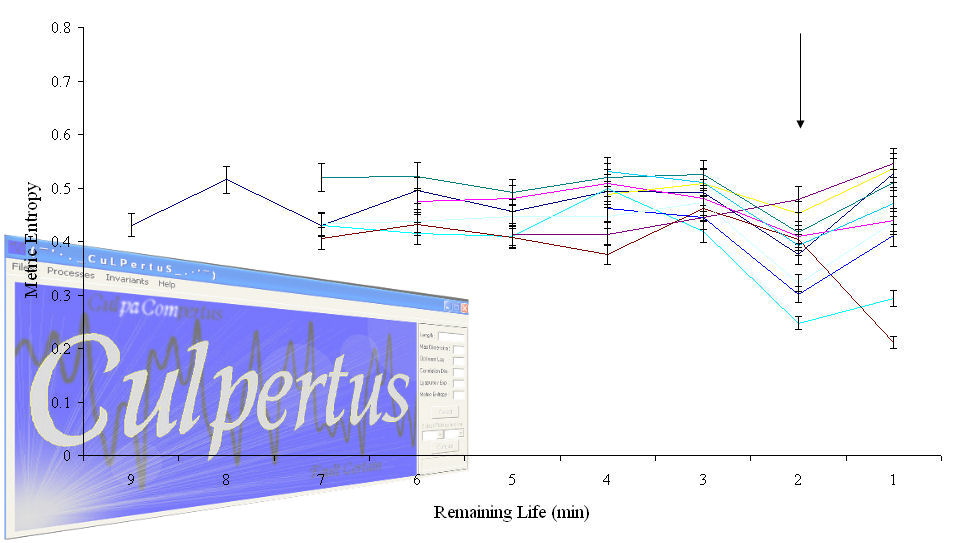
the majority of the conducted tests, a pattern has emerged. A consistent
decrement in variations of both metric entropy and Lyapunov exponent just
before the breakage was observed. As a result, metric entropy and/or
Lyapunov exponent variation could be proposed as an early warning system.
In addition, various MatLAB codes and time series analysing program
Culpertus were created.
An Investigation with Fractal Geometry Analysis of Time Series, by Aysun Kaya
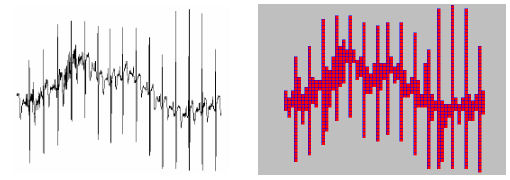
In this project, three kinds of fractal dimensions, correlation
dimension, Hausdorff dimension and box-counting dimension were used to
examine time series. To demonstrate the universality of the method, ECG
(Electrocardiogram) time series were chosen. The ECG signals consisted of
ECGs
of three persons in four states for two applications. States are normal,
walk, rapid walk and run. These three people are selected from the same
age, and height group to minimize variations. Fractal dimension
measurements under different conditions were carried out to find out
whether these dimensions could discriminate the states under question. A
total of 24 ECG signals were measured to determine their corresponding
fractal dimensions through the above-mentioned methods. It was expected
that fractal dimension values would indicate the states related to the
different activities of the persons. Results show that no direct link was
found connecting a certain dimension to a certain activity in a consistent
manner. Furthermore, no congruence was also found among the three
dimensions that were employed. According to these results, it can be
stated that fractal dimension values on their own may not be sufficient to
identify distinct cases hidden in time series. Time series analysis may be
facilitated when additional tools and methods are utilized as well as
fractal dimensions at detecting telltale signs in signals of different
states.
Contrast Enhancement By Lateral Inhibition In A Sensory Network,
by Anil Coskun
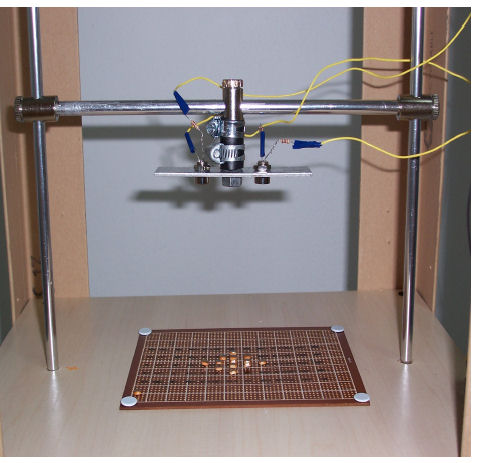
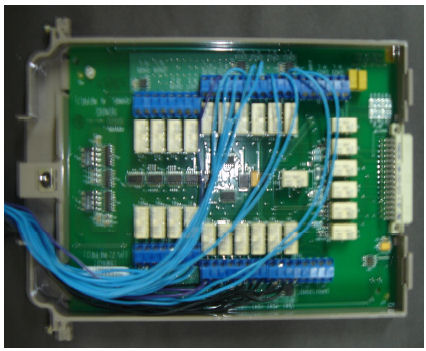
The most important mechanism to occur in biological distributed sensory networks (DSNs) is called Lateral Inhibition, (LI). LI relies on one simple principle. Each sensor strives to suppress its neighbors in proportion to its own excitation. In this study, LI mechanism is exploited to localize the unknown position of a light source that illuminated the photosensitive sensory network containing high and low quality sensors. Each photosensitive sensor was then calibrated to accurately read the distance to the light source. A series of experiments were conducted employing both quality sensors. Low quality array was allowed to take advantage of LI, whereas the high quality one was not. Results showed that the lateral inhibition mechanism increased the sensitivity of inferior quality sensors, giving the ability to make the localization as sensitive as high quality sensors do. This suggests that the networks with a multitude of sensors could be made cost-effective, were these sensory networks equipped with LI.
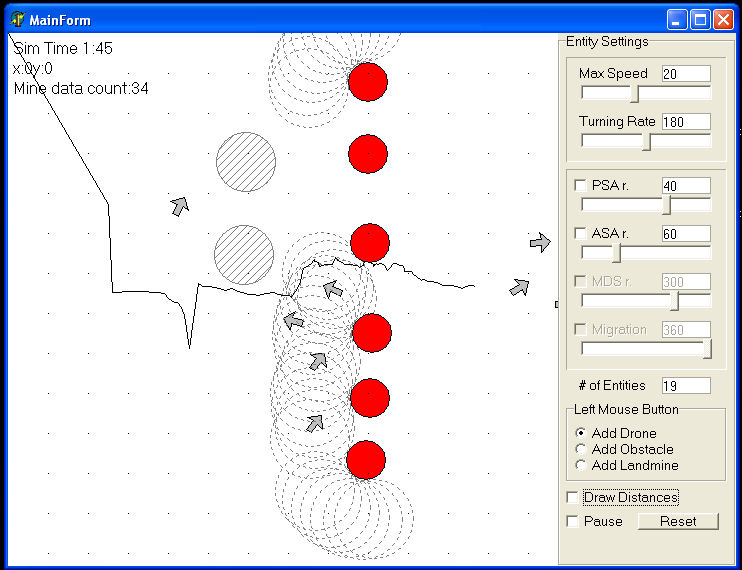
A distributed behavioral model for landmine detection robots, by Cagdas Bayram
This study presents a distributed navigation, detection and swarming model for a group of minimalist identical robotic agents. Decision making process of agents is weight based in contrast to widely used precedence based rules. The group is indirectly controlled by an alpha agent that has more sophisticated systems. Computer simulations of the proposed behavioral model generated promising results.
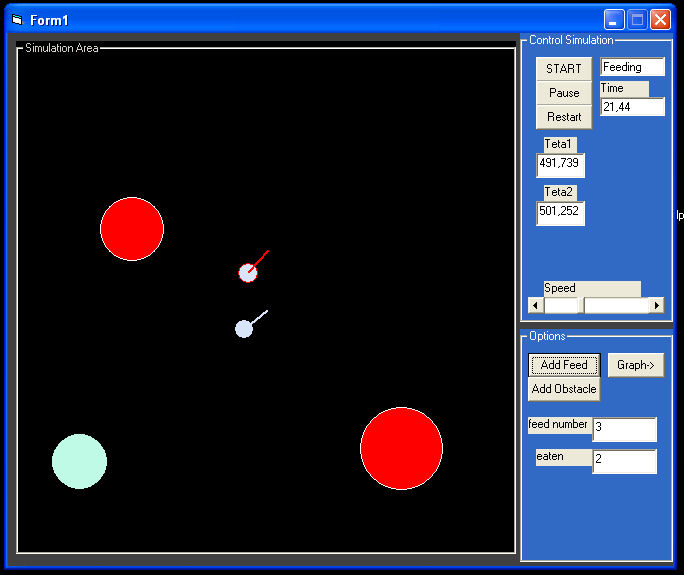
Characterization of Swarm Behavior Through Pairwise Interactions by
Tsallis entropy,
by Fatih Cemal Can
This study tries to look at the interactions of a swarm of two at an elementary level. The change in the swarm entropy during the interactions is investigated. The characterization of swarm behavior has been subsumed in four modes, i.e. normal-free, normal-swarm, feeding and obstacle modes. Based on these modes, an entropy based algorithm is constructed to observe pair-wise interactions for each mode. For these modes, individuals of swarm are taken into account as self-driven interacting particles in the mathematical model. Statistical entropy definitions are used to control individual’s behavior in feeding and obstacle modes. Individuals lose interactions enabling swarm behavior in feeding mode because of the priority of feeding for individuals as in nature. On the other hand, when swarm confronts an obstacle, individuals interact as much as they can. However they may lose interaction, depending on the size of the obstacle and position of the individuals. For feeding and obstacle modes, it is observed that Tsallis Entropy fits in the simulation better than other entropy definitions such as Shannon and Renyi.
Data-driven Self Organized Modeling Using Reinforcement Learning in Autonomous Units, by Murat Karakurt
The control of dynamic structures may not be always achieved by use of traditional control schemes. Since analysis, simulation and realization of these control policies almost always require an explicit "fairly-trustworthy" formulation of the phenomena, after which a satisfactory performance is expected. Yet, environmental uncertainty and nonlinear system behavior, which are ubiquitous in any and every system, necessitate a more complex, ever changing, adapting modelers. In this study, such an empirical modeler is being devised in the form of a self-organizing, self-tuning network. Thus a heuristic modeling and an intelligent reasoning are obtained based on sensing of the relevant physical qualities, fusing of the sensory information, if necessary, storage of data as either parameter adaptation or database through an optimal, intelligent paradigm. Optimal control policies are to be taught to the system by Reinforcement Learning, where an agent tries to discover the underlying rules within the environment through interactions.
The Control of a Manipulator Using Cerebellar Model Articulation
Controllers,
by Murat Darka
The Cerebellar Model Articulation Controller (CMAC) is a Neural Network topology commonly used in the field of robotic control which.was developed in the '70s by Albus. Robot motion requires complicated, explicit and an accurate model in the case of conventional control techniques. An accurate model is hard to implement due to uncertainties, thus an ad hoc controller, CMAC, seem to be a good choice. In this study, a robotic manipulator is intended to be controlled by a CMAC. As is the case for many CMAC architectures, these controllers are often plagued with instability that significantly deteriorates the network performance. A measure of the system performance is to be formulated so as to observe and then possibly control the system. Various performance measures are currently being studied. Following the analyses, a computer simulation along with physical experiments are to be conducted.